Pré-projet de validation de dévracage par robot FANUC 6 axes

SPECIGONE INDUSTRIES : Un intégrateur de robot en Rhône-Alpes qui voit plus loin
En tant qu'intégrateur des robots FANUC en Rhône-Alpes et dernièrement pour un client présent sur des sites dans le Rhône, l'Isère et l'Ain, nous proposons de valider les principes de faisabilité industrielle par la simulation réelle de fonctions.
Cette proposition est née d'un constat chez nos clients : la sécurisation des parcours d'investissement industriel devient un enjeu majeur. Le choix d'un robot est déterminé par sa capacité à atteindre l'objectif de rayon d'action, de charge emportée, de cadence, de répétitivité.
C'est dans ce contexte qu'au delà de la pré-étude de faisabilité "théorique", nous proposons désormais avec nos partenaires fabricants de fonctions standards (robot, cobot, soudure, vision industrielle, marquage,...) des tests en condition réelle afin de valider les principes de fonctionnements des futures machines et lignes de production sur mesure que nous développons, concevons, assemblons et intégrons chez nos clients.
Un test de faisabilité en complément de notre pré-étude technique pour une ligne de production sur-mesure
L'origine de ce test du robot FANUC 6 axes grandeur nature est liée à une demande de validation d'investissement faite en interne par notre client, acteur majeur dans la fabrication de matériel électrique pour l'automatisme et le bâtiment.
Après avoir mené une phase de pré-étude en DAO et présenté nos plans et argumenté nos choix de matériels, notre client hésitait quand au type de robot à confirmer. C'est à cette occasion que nous avons proposé le test en location du robot FANUC 6 axes (base, épaule, coude et trois axes du poignet (également rotation selon les 3 axes et translation selon les 3 axes) modèle M10ID12, mis en oeuvre par l’équipe SPECIGONE.
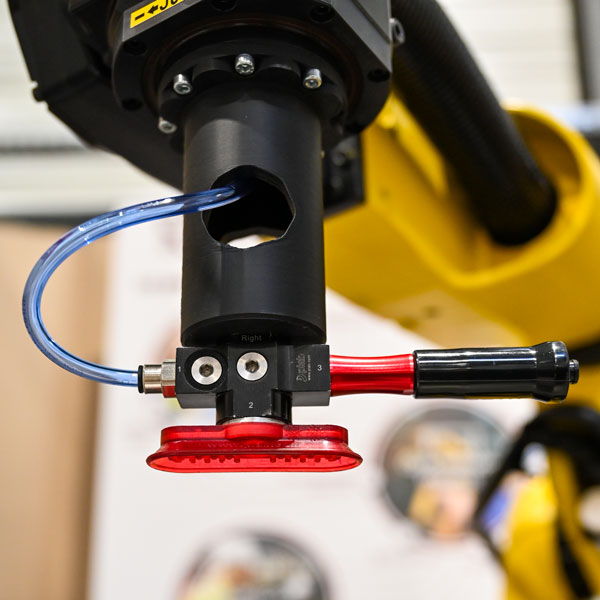
Le robot qui manipule une charge utile jusqu'à 12kgs a ainsi été mis en application pour la prise de produit par une ventouse PIAB, autre partenaire SPECIGONE dans le domaine de la préhension industrielle. Le choix du robot s'est effectué en connaissance des champs actuels et futurs d'usage industriels du client afin de couvrir un nombre significatif d'application de dévracage mais aussi potentiellement d'assemblage de pièces.
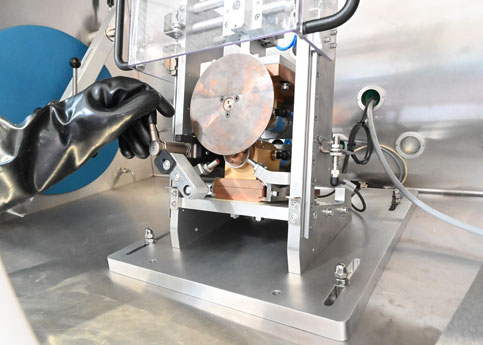
Le test portait aussi et surtout sur les capacités d'une fonction de visualisation 2D par reconnaissance de position et d’orientation par caméra FANUC sur zone de préhension. Enjeu majeur de flexibilité pour le choix de cette fonction robotique pour notre client.

Pourquoi intégrer un robot sur une machine spéciale?
La robotique et la machine spéciale au sein d'une même ligne de production permettent désormais une productivité et une flexibilité optimale

L'intégration de robot en production est devenue progressivement accessible au cours des vingt dernières années pour des industriels produisant des moyennes séries ou pour des applications moins complexes que celles rencontrées par exemple dans l'automobile.
La production en plus grande série et l'étoffement de la gamme de modèles par les fabricants de robots industriels a permis d'abaisser les coûts et de proposer des intégrations dans des process d'assemblage de pièces, perçage, soudure, préhension,... au coeur d'une machine spéciale.
Ce qui freine certains industriels à l'intégration de robotique dans leurs lignes de production peut être la difficulté à maîtriser la compétence interne spécifique en maintenance et la potentielle complexité de programmation lorsqu'il s'agit d'adapter l'outil industriel pour un changement de format ou un retrofit de machine. Mais les fabricants de robots se sont adaptés et proposent désormais des interfaces / applications de programmations beaucoup plus intuitives. Les méthodes d'apprentissage par points dans l'espace se sont généralisées pour effectuer une programmation simple et peu chronophage.
SPECIGONE maîtrise et accompagne ses clients dans la compétence d'intégration de robot FANUC, ABB, et de cobot FANUC et UR et d'autres marques dans le process client. Qu'il s'agisse d'une application robotique autonome ou d'une intégration au coeur d'une machine spéciale conçue en périphérie, le choix peut ainsi être porté par une pré-étude assisté d'un test en réel comme dans le cas présent.
Qu'est ce que l'intégration de vision industrielle en robotique?
Un robot équipé d'une caméra 2D ou 3D permet de décupler les performances robotiques notamment via l'apprentissage
La vision industrielle par caméra existe depuis longtemps en industrie mais elle est en passe de s'intégrer de plus en plus systématiquement sur les applications avec robot. Pour mieux comprendre la finalité, voici les options proposées par notre partenaire FANUC :
- Visualisation par caméra 2D (2 dimensions sur un seul plan en X et Y) permettant la reconnaissance de position et d’orientation d'un objet sur zone de préhension. Le renseignement de la hauteur de produit par rapport au niveau 0 se fait manuellement dans l'interface homme-machine du robot.
- Visualisation par caméra 2D et demi (également appelée 2D+) permettant en plus de la reconnaissance d'une pièce par son contour, une gestion du niveau d’une couche : la caméra ne sait pas gérer seule la hauteur mais on indique via l'interface homme-machine du robot une matrice de couches qui permet notamment de gérer les applications de palettisation ou d'empilement. La caméra ne gère pas de détection de produit en pente.
- Visualisation par caméra 3D : La vision industrielle s'effectue en prenant en compte l’inclinaison des produits. La caméra informe le robot d'une nécessité de préhension d'angle dans un environnement non normé en 2D.
La programmation de l'ensemble caméra + robot se fait dans un mode d'apprentissage du contour de la forme. C'est la puissance de calcul et l'amélioration de l'interface homme-machine par les fabricants de robots dont fait partie FANUC qui a permis de rendre cette fonctionnalité disponible sans un mode de programmation expert.
SPECIGONE est spécialiste de l'intégration de ce type d'ensemble robot industriel avec assistance par caméra en vision industrielle et accompagne ses clients dans l'intégration de la compétence via la formation à l'interface et au mode de programmation simplifié. L'entreprise est également experte en maintenance de ces équipements.


Spécificité du cas client : préhension par ventouse et empilement par le robot en 2D+
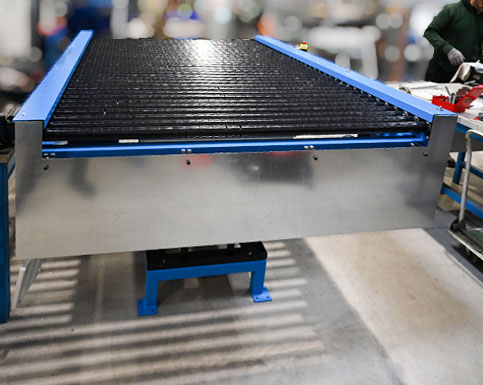
La réalisation de l'application test concerne la préhension de disjoncteurs posés de façon aléatoire en deux dimensions sur un même plan. SPECIGONE s'est chargé du design et de la réalisation du préhenseur pneumatique. Ce dernier est composé d'une pièce cylindrique creuse réalisée en impression 3D chez SPECIGONE et d'une ventouse venturi.
La ventouse de préhension a fait l'objet d'une sélection et validation avec notre partenaire fabricant PIAB : La forme et les dimensions devant correspondre à la géométrie de la pièce afin d'obtenir une bonne tenue du produit une fois l'aspiration par venturi effectuée. Le dimensionnement de la pompe à vide se faisant selon la même logique.
La conception du poste, l'assemblage et la programmation de l'ensemble a été réalisée par SPECIGONE :
- Réalisation des supports pour le robot, la table de préhension, le support caméra en fonction de l'angle de vision. Montage mécanique de l'ensemble.
- Le raccordement électrique de puissance et de contrôle - commande.
- La configuration du robot et de l'application de vision industrielle par caméra.
- La programmation par prise de points dans l'espace et adaptation en langage robot FANUC.
Pour faciliter la programmation de l'ensemble robot + caméra, FANUC intègre une procédure initiale de renseignement du modèle.
Par la suite en mode production, lorsqu’il y a plusieurs produits dans le champ de vision, le programme de la caméra attribue un score de similarité du produit avec le modèle renseigné en fonction du niveau de correspondance du contour. Ceci permet de créer un "ordre" de préhension logique.
Enfin, la caméra exporte les coordonnées en X et Y de la pièce vers le robot. L’opération de vision est récupérée par le robot dans le programme. Ce dernier peut effectuer l'opération de déplacement dans l'espace.